update assets
@@ -166,10 +166,6 @@ Characteristic of good features:
|
|||||||
|
|
||||||
##### Harris corner detector
|
##### Harris corner detector
|
||||||
|
|
||||||
|
|
||||||
|
|
||||||
|
|
||||||
|
|
||||||
### Applications of local features
|
### Applications of local features
|
||||||
|
|
||||||
#### Image alignment
|
#### Image alignment
|
||||||
|
|||||||
@@ -10,13 +10,13 @@ Goal: Descriptor distinctiveness
|
|||||||
Harris corner detector:
|
Harris corner detector:
|
||||||
|
|
||||||
> Other existing variants:
|
> Other existing variants:
|
||||||
> - Hessian & Harris: [Beaudet ‘78], [Harris ‘88]
|
> - Hessian & Harris: [Beaudet '78], [Harris '88]
|
||||||
> - Laplacian, DoG: [Lindeberg ‘98], [Lowe 1999]
|
> - Laplacian, DoG: [Lindeberg '98], [Lowe 1999]
|
||||||
> - Harris-/Hessian-Laplace: [Mikolajczyk & Schmid ‘01]
|
> - Harris-/Hessian-Laplace: [Mikolajczyk & Schmid '01]
|
||||||
> - Harris-/Hessian-Affine: [Mikolajczyk & Schmid ‘04]
|
> - Harris-/Hessian-Affine: [Mikolajczyk & Schmid '04]
|
||||||
> - EBR and IBR: [Tuytelaars & Van Gool ‘04]
|
> - EBR and IBR: [Tuytelaars & Van Gool '04]
|
||||||
> - MSER: [Matas ‘02]
|
> - MSER: [Matas '02]
|
||||||
> - Salient Regions: [Kadir & Brady ‘01]
|
> - Salient Regions: [Kadir & Brady '01]
|
||||||
> - Others…
|
> - Others…
|
||||||
|
|
||||||
### Deriving a corner detection criterion
|
### Deriving a corner detection criterion
|
||||||
|
|||||||
@@ -43,15 +43,15 @@ $$
|
|||||||
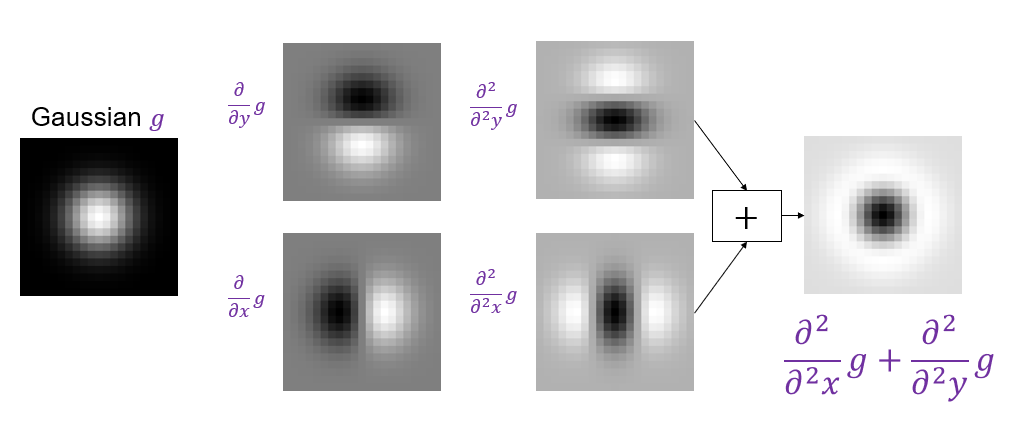
\nabla^2_{norm}=\sigma^2\nabla^2\left(\frac{\partial^2}{\partial x^2}g+\frac{\partial^2}{\partial y^2}g\right)
|
\nabla^2_{norm}=\sigma^2\nabla^2\left(\frac{\partial^2}{\partial x^2}g+\frac{\partial^2}{\partial y^2}g\right)
|
||||||
$$
|
$$
|
||||||
|
|
||||||

|
|
||||||
|
|
||||||
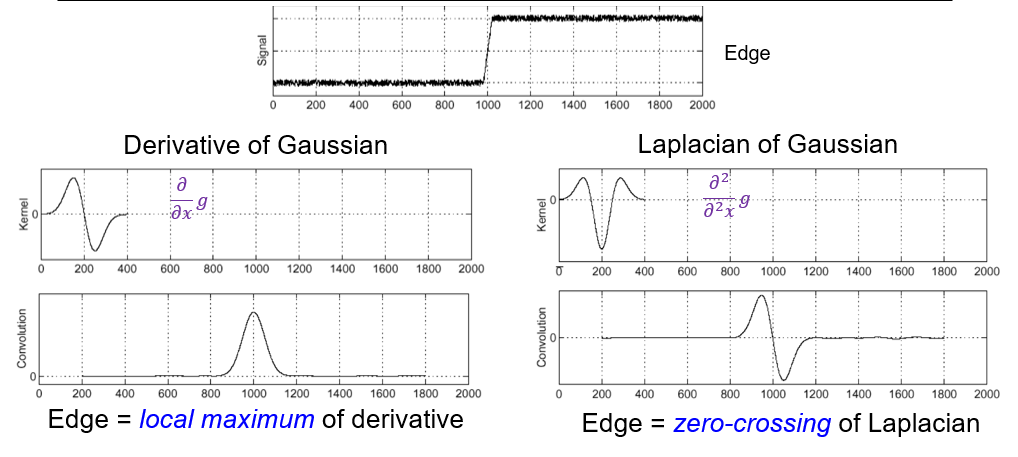
#### Edge detection with LoG
|
#### Edge detection with LoG
|
||||||
|
|
||||||

|
|
||||||
|
|
||||||
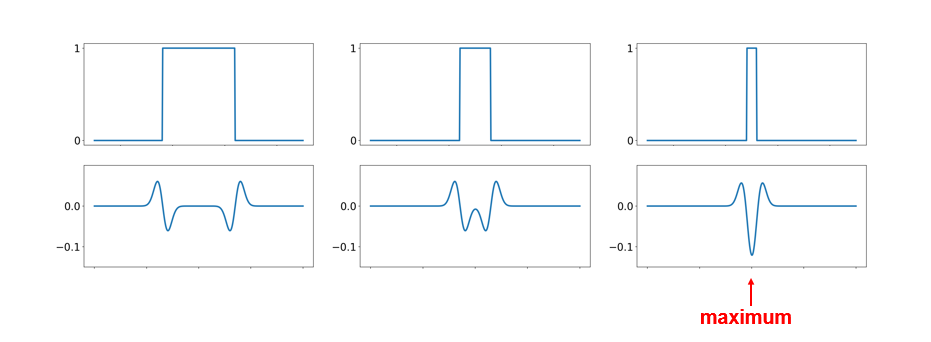
#### Blob detection with LoG
|
#### Blob detection with LoG
|
||||||
|
|
||||||

|
|
||||||
|
|
||||||
### Difference of Gaussians (DoG)
|
### Difference of Gaussians (DoG)
|
||||||
|
|
||||||
|
|||||||
64
pages/CSE559A/CSE559A_L20.md
Normal file
@@ -0,0 +1,64 @@
|
|||||||
|
# CSE559A Lecture 20
|
||||||
|
|
||||||
|
## Local feature descriptors
|
||||||
|
|
||||||
|
Detection: Identify the interest points
|
||||||
|
|
||||||
|
Description: Extract vector feature descriptor surrounding each interest point.
|
||||||
|
|
||||||
|
Matching: Determine correspondence between descriptors in two views
|
||||||
|
|
||||||
|
### Image representation
|
||||||
|
|
||||||
|
Histogram of oriented gradients (HOG)
|
||||||
|
|
||||||
|
- Quantization
|
||||||
|
- Grids: fast but applicable only with few dimensions
|
||||||
|
- Clustering: slower but can quantize data in higher dimensions
|
||||||
|
- Matching
|
||||||
|
- Histogram intersection or Euclidean may be faster
|
||||||
|
- Chi-squared often works better
|
||||||
|
- Earth mover’s distance is good for when nearby bins represent similar values
|
||||||
|
|
||||||
|
#### SIFT vector formation
|
||||||
|
|
||||||
|
Computed on rotated and scaled version of window according to computed orientation & scale
|
||||||
|
|
||||||
|
- resample the window
|
||||||
|
|
||||||
|
Based on gradients weighted by a Gaussian of variance half the window (for smooth falloff)
|
||||||
|
|
||||||
|
4x4 array of gradient orientation histogram weighted by magnitude
|
||||||
|
|
||||||
|
8 orientations x 4x4 array = 128 dimensions
|
||||||
|
|
||||||
|
Motivation: some sensitivity to spatial layout, but not too much.
|
||||||
|
|
||||||
|
For matching:
|
||||||
|
|
||||||
|
- Extraordinarily robust detection and description technique
|
||||||
|
- Can handle changes in viewpoint
|
||||||
|
- Up to about 60 degree out-of-plane rotation
|
||||||
|
- Can handle significant changes in illumination
|
||||||
|
- Sometimes even day vs. night
|
||||||
|
- Fast and efficient—can run in real time
|
||||||
|
- Lots of code available
|
||||||
|
|
||||||
|
#### SURF
|
||||||
|
|
||||||
|
- Fast approximation of SIFT idea
|
||||||
|
- Efficient computation by 2D box filters & integral images
|
||||||
|
- 6 times faster than SIFT
|
||||||
|
- Equivalent quality for object identification
|
||||||
|
|
||||||
|
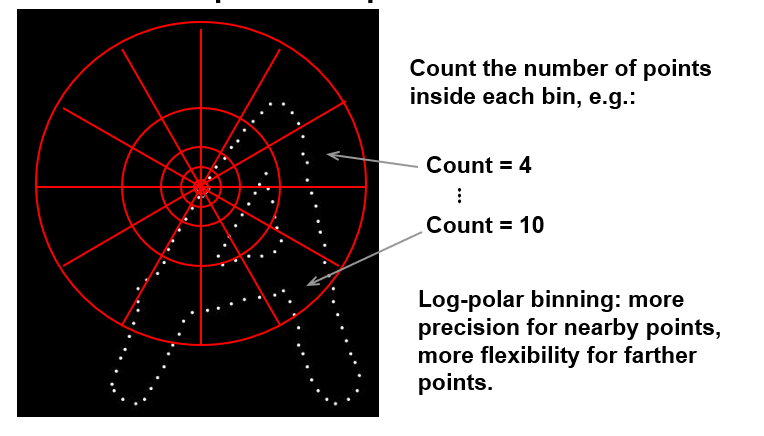
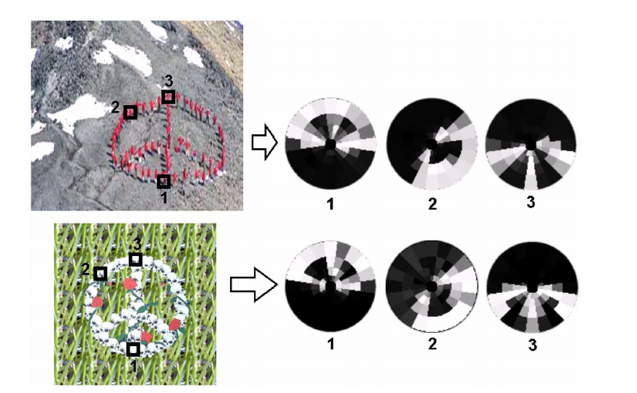
#### Shape context
|
||||||
|
|
||||||
|
|
||||||
|
|
||||||
|
#### Self-similarity Descriptor
|
||||||
|
|
||||||
|
|
||||||
|
|
||||||
|
## Local feature matching
|
||||||
|
|
||||||
|
### Matching
|
||||||
BIN
public/CSE559A/Blob_detection_with_LoG.png
Normal file
{kind=link}
|
After Width: | Height: | Size: 20 KiB |
BIN
public/CSE559A/DeconvNet.png
Normal file
{kind=link}
|
After Width: | Height: | Size: 268 KiB |
BIN
public/CSE559A/Depth_and_Normal_Estimation.png
Normal file
{kind=link}
|
After Width: | Height: | Size: 818 KiB |
BIN
public/CSE559A/Edge_detection_with_LoG.png
Normal file
{kind=link}
|
After Width: | Height: | Size: 128 KiB |
BIN
public/CSE559A/EncoderDecoder_vs_U-Net.png
Normal file
{kind=link}
|
After Width: | Height: | Size: 40 KiB |
BIN
public/CSE559A/ExU-Net.png
Normal file
{kind=link}
|
After Width: | Height: | Size: 359 KiB |
BIN
public/CSE559A/Laplacian_of_Gaussian.png
Normal file
{kind=link}
|
After Width: | Height: | Size: 41 KiB |
BIN
public/CSE559A/Panoptic_Feature_Pyramid_Network.png
Normal file
{kind=link}
|
After Width: | Height: | Size: 187 KiB |
BIN
public/CSE559A/Self-similarity_descriptor.png
Normal file
{kind=link}
|
After Width: | Height: | Size: 265 KiB |
BIN
public/CSE559A/Shape_context_descriptor.png
Normal file
{kind=link}
|
After Width: | Height: | Size: 64 KiB |
BIN
public/CSE559A/U-Net.png
Normal file
{kind=link}
|
After Width: | Height: | Size: 79 KiB |