updates
This commit is contained in:
280
content/CSE510/CSE510_L10.md
Normal file
280
content/CSE510/CSE510_L10.md
Normal file
@@ -0,0 +1,280 @@
|
||||
# CSE510 Deep Reinforcement Learning (Lecture 10)
|
||||
|
||||
## Deep Q-network (DQN)
|
||||
|
||||
Network input = Observation history
|
||||
|
||||
- Window of previous screen shots in Atari
|
||||
|
||||
Network output = One output node per action (returns Q-value)
|
||||
|
||||
### Stability issues of DQN
|
||||
|
||||
Naïve Q-learning oscillates or diverges with neural nets
|
||||
|
||||
Data is sequential and successive samples are correlated (time-correlated)
|
||||
|
||||
- Correlations present in the sequence of observations
|
||||
- Correlations between the estimated value and the target values
|
||||
- Forget previous experiences and overfit similar correlated samples
|
||||
|
||||
Policy changes rapidly with slight changes to Q-values
|
||||
|
||||
- Policy may oscillate
|
||||
- Distribution of data can swing from one extreme to another
|
||||
|
||||
Scale of rewards and Q-values is unknown
|
||||
|
||||
- Gradients can be unstable when back-propagated
|
||||
|
||||
### Deadly Triad in Reinforcement Learning
|
||||
|
||||
Off-policy learning (learning the expected reward changes of policy change instead of the optimal policy)
|
||||
Function approximation (usually with supervised learning)
|
||||
|
||||
$Q(s,a)\gets f_\theta(s,a)$
|
||||
|
||||
Bootstrapping (self-reference)
|
||||
|
||||
- $Q(s,a)\gets r(s,a)+\gamma \max_{a'\in A} Q(s',a')$
|
||||
|
||||
### Stable Solutions for DQN
|
||||
|
||||
DQN provides a stable solution to deep value-based RL
|
||||
|
||||
1. Experience replay
|
||||
2. Freeze target Q-network
|
||||
3. Clip rewards to sensible range
|
||||
|
||||
#### Experience replay
|
||||
|
||||
To remove correlations, build dataset from agent's experience
|
||||
|
||||
- Take action $a_t$
|
||||
- Store transition $(s_t, a_t, r_t, s_{t+1})$ in replay memory $D$
|
||||
- Sample random mini-batch of transitions $(s,a,r,s')$ from replay memory $D$
|
||||
- Optimize Mean Squared Error between Q-network and Q-learning target
|
||||
|
||||
$$
|
||||
L_i(\theta_i) = \mathbb{E}_{(s,a,r,s') \sim U(D)} \left[ \left( r+\gamma \max_{a'\in A} Q(s',a';\theta_i^-)-Q(s,a;\theta_i) \right)^2 \right]
|
||||
$$
|
||||
|
||||
Here $U(D)$ is the uniform distribution over the replay memory $D$.
|
||||
|
||||
#### Fixed Target Q-Network
|
||||
|
||||
To avoid oscillations, fix parameters used in Q- learning target
|
||||
|
||||
- Compute Q-learning target w.r.t old, fixed parameters
|
||||
- Optimize MSE between Q-learning targets and Q-network
|
||||
- Periodically update target Q-network parameters
|
||||
|
||||
#### Reward/Value Range
|
||||
|
||||
- To limit impact of any one update, control the reward / value range
|
||||
- DQN clips the rewards to $[-1, +1]$
|
||||
- Prevents too large Q-values
|
||||
- Ensures gradients are well-conditioned
|
||||
|
||||
### DQN Implementation
|
||||
|
||||
#### Preprocessing
|
||||
|
||||
- Raw images: $210\times 160$ pixel images with 128-color palette
|
||||
- Rescaled images: $84\times 84$
|
||||
- Input: $84\times 84\times 4$ (4 most recent frames)
|
||||
|
||||
#### Training
|
||||
|
||||
DQN source code:
|
||||
sites.google.com/a/deepmind.com/
|
||||
|
||||
- 49 Atari 2600 games
|
||||
- Use RMSProp algorithms with minibatches 32
|
||||
- Use 50 million frames (38 days)
|
||||
- Replay memory contains 1 million recent frames
|
||||
- Agent select actions on every 4th frames
|
||||
|
||||
#### Evaluation
|
||||
|
||||
- Agent plays each games 30 times for 5 min with random initial conditions
|
||||
- Human plays the games in the same scenarios
|
||||
- Random agent play in the same scenarios to obtain baseline performance
|
||||
|
||||
### DeepMind Atari
|
||||
|
||||
Beat human players in 49 out of 49 games
|
||||
|
||||
Strengths:
|
||||
|
||||
- Quick-moving, short-horizon games
|
||||
- Pinball (2539%)
|
||||
|
||||
Weakness:
|
||||
|
||||
- Long-horizon games that do not converge
|
||||
- Walk-around games
|
||||
- Montezuma’s revenge
|
||||
|
||||
### DQN Summary
|
||||
|
||||
- Deep Q-network agent can learn successful policies directly from high-dimensional input using end-to-end reinforcement learning
|
||||
|
||||
- The algorithm achieve a level surpassing professional human games tester across 49 games
|
||||
|
||||
## Extensions of DQN
|
||||
|
||||
- Double Q-learning for fighting maximization bias
|
||||
- Prioritized experience replay
|
||||
- Dueling Q networks
|
||||
- Multistep returns
|
||||
- Distributed DQN
|
||||
|
||||
### Double Q-learning for fighting maximization bias
|
||||
|
||||
#### Maximization Bias for Q-learning
|
||||
|
||||
|
||||
|
||||
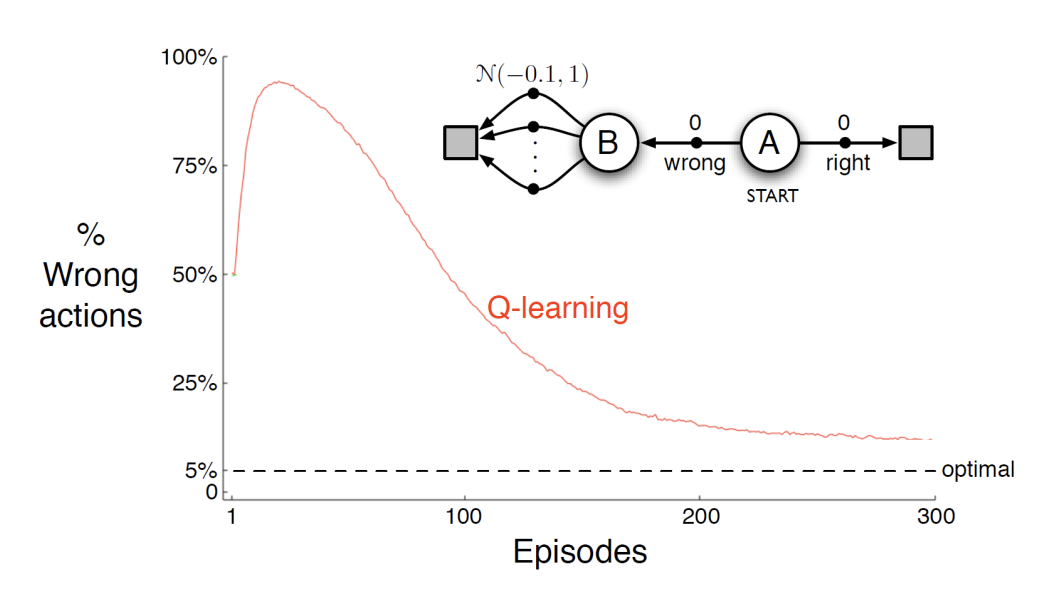
False signals from $\mathcal{N}(0.1,1)$, may have few positive results from random noise. (However, in the long run, it will converge to the expected negative value.)
|
||||
|
||||
#### Double Q-learning
|
||||
|
||||
(Hado van Hasselt 2010)
|
||||
|
||||
Train 2 action-value functions, Q1 and Q2
|
||||
|
||||
Do Q-learning on both, but
|
||||
|
||||
- never on the same time steps (Q1 and Q2 are indep.)
|
||||
- pick Q1 or Q2 at random to be updated on each step
|
||||
|
||||
If updating Q1, use Q2 for the value of the next state:
|
||||
|
||||
$$
|
||||
Q_1(S_t,A_t) \gets Q_1(S_t,A_t) + \alpha (R_{t+1} + \gamma Q_2(S_{t+1}, \arg\max_{a'\in A} Q_1(S_{t+1},a')) - Q_1(S_t,A_t))
|
||||
$$
|
||||
|
||||
Action selections are (say) $\epsilon$-greedy with respect to the sum of Q1 and Q2. (unbiased estimation and same convergence as Q-learning)
|
||||
|
||||
Drawbacks:
|
||||
|
||||
- More computationally expensive (only one function is trained at a time)
|
||||
|
||||
```pseudocode
|
||||
Initialize Q1 and Q2
|
||||
For each episode:
|
||||
Initialize state
|
||||
For each step:
|
||||
Choose $A$ from $S$ using policy derived from Q1 and Q2
|
||||
Take action $A$, observe $R$ and $S'$
|
||||
With probability $0.5$, update Q1:
|
||||
$Q1(S,A) \gets Q1(S,A) + \alpha (R + \gamma Q2(S', \arg\max_{a'\in A} Q1(S',a')) - Q1(S,A))$
|
||||
Otherwise, update Q2:
|
||||
$Q2(S,A) \gets Q2(S,A) + \alpha (R + \gamma Q1(S', \arg\max_{a'\in A} Q2(S',a')) - Q2(S,A))$
|
||||
$S \gets S'$
|
||||
End for
|
||||
End for
|
||||
```
|
||||
|
||||
#### Double DQN
|
||||
|
||||
(van Hasselt, Guez, Silver, 2015)
|
||||
|
||||
A better implementation of Double Q-learning.
|
||||
|
||||
- Dealing with maximization bias of Q-Learning
|
||||
- Current Q-network $w$ is used to select actions
|
||||
- Older Q-network $w^-$ is used to evaluate actions
|
||||
|
||||
$$
|
||||
l=\left(r+\gamma Q(s', \arg\max_{a'\in A} Q(s',a';w);w^-) - Q(s,a;w)\right)^2
|
||||
$$
|
||||
|
||||
Here $\arg\max_{a'\in A} Q(s',a';w)$ is the action selected by the current Q-network $w$.
|
||||
|
||||
$Q(s', \arg\max_{a'\in A} Q(s',a';w);w^-)$ is the action evaluation by the older Q-network $w^-$.
|
||||
|
||||
### Prioritized Experience Replay
|
||||
|
||||
(Schaul, Quan, Antonoglou, Silver, ICLR 2016)
|
||||
|
||||
Weight experience according to "surprise" (or error)
|
||||
|
||||
- Store experience in priority queue according to DQN error
|
||||
$$
|
||||
\left|r+\gamma \arg\max_{a'\in A} Q(s',a',w^-)-Q(s,a,w)\right|
|
||||
$$
|
||||
|
||||
- Stochastic Prioritization
|
||||
$$
|
||||
P(i)=\frac{p_i^\alpha}{\sum_k p_k^\alpha}
|
||||
$$
|
||||
- $p_i$ is proportional to the DQN error
|
||||
|
||||
- $\alpha$ determines how much prioritization is used, with $\alpha = 0$ corresponding to the uniform case.
|
||||
|
||||
### Dueling Q networks
|
||||
|
||||
(Wang et.al., ICML, 2016)
|
||||
|
||||
- Split Q-network into two channels
|
||||
|
||||
- Action-independent value function $V(s; w)$: measures how good is the state $s$
|
||||
|
||||
- Action-dependent advantage function $A(s, a; w)$: measure how much better is action $a$ than the average action in state $s$
|
||||
$$
|
||||
Q(s,a; w) = V(s; w) + A(s, a; w)
|
||||
$$
|
||||
|
||||
- Advantage function is defined as:
|
||||
$$
|
||||
A^\pi(s, a) = Q^\pi(s, a) - V^\pi(s)
|
||||
$$
|
||||
|
||||
The value stream learns to pay attention to the road
|
||||
|
||||
**The advantage stream**: pay attention only when there are cars immediately in front, so as to avoid collisions
|
||||
|
||||
### Multistep returns
|
||||
|
||||
Truncated n-step return from a state $s_t$
|
||||
|
||||
$$
|
||||
R^{n}_t = \sum_{i=0}^{n-1} \gamma^{(k)}_t R_{t+k+1}
|
||||
$$
|
||||
|
||||
Multistep Q-learning update rule:
|
||||
|
||||
$$
|
||||
I=\left(R^{n}_t + \gamma^{(n)}_t \max_{a'\in A} Q(s_{t+n},a';w)-Q(s,a,w)\right)^2
|
||||
$$
|
||||
|
||||
Singlestep Q-learning update rule:
|
||||
|
||||
$$
|
||||
I=\left(r+\gamma \max_{a'\in A} Q(s',a';w)-Q(s,a,w)\right)^2
|
||||
$$
|
||||
|
||||
### Distributed DQN
|
||||
|
||||
- Separating Learning from Acting
|
||||
- Distributing hundreds of actors over CPUs
|
||||
- Advantages: better harnessing computation, local priority evaluation, better exploration
|
||||
|
||||
#### Distributed DQN with Recurrent Experience Replay (R2D2)
|
||||
|
||||
Providing an LSTM layer after the convolutional stack
|
||||
|
||||
- To deal with partial observability
|
||||
|
||||
Other tricks:
|
||||
|
||||
- prioritized distributed replay
|
||||
- n-step double Q-learning (with n = 5)
|
||||
- generating experience by a large number of actors (typically 256)
|
||||
- learning from batches of replayed experience by a single learner
|
||||
|
||||
#### Agent 57
|
||||
|
||||
[link to paper](https://deepmind.google/discover/blog/agent57-outperforming-the-human-atari-benchmark/)
|
||||
@@ -12,4 +12,5 @@ export default {
|
||||
CSE510_L7: "CSE510 Deep Reinforcement Learning (Lecture 7)",
|
||||
CSE510_L8: "CSE510 Deep Reinforcement Learning (Lecture 8)",
|
||||
CSE510_L9: "CSE510 Deep Reinforcement Learning (Lecture 9)",
|
||||
CSE510_L10: "CSE510 Deep Reinforcement Learning (Lecture 10)",
|
||||
}
|
||||
1
content/Math401/Extending_thesis/Math401_S3.md
Normal file
1
content/Math401/Extending_thesis/Math401_S3.md
Normal file
@@ -0,0 +1 @@
|
||||
# Math 401, Fall 2025: Thesis notes, S3, Special Barnard space
|
||||
BIN
public/CSE510/Maximization_bias_of_Q-learning.png
Normal file
BIN
public/CSE510/Maximization_bias_of_Q-learning.png
Normal file
{kind=link}
Binary file not shown.
|
After Width: | Height: | Size: 90 KiB |
Reference in New Issue
Block a user