upgrade structures and migrate to nextra v4
This commit is contained in:
145
content/CSE559A/CSE559A_L20.md
Normal file
145
content/CSE559A/CSE559A_L20.md
Normal file
@@ -0,0 +1,145 @@
|
||||
# CSE559A Lecture 20
|
||||
|
||||
## Local feature descriptors
|
||||
|
||||
Detection: Identify the interest points
|
||||
|
||||
Description: Extract vector feature descriptor surrounding each interest point.
|
||||
|
||||
Matching: Determine correspondence between descriptors in two views
|
||||
|
||||
### Image representation
|
||||
|
||||
Histogram of oriented gradients (HOG)
|
||||
|
||||
- Quantization
|
||||
- Grids: fast but applicable only with few dimensions
|
||||
- Clustering: slower but can quantize data in higher dimensions
|
||||
- Matching
|
||||
- Histogram intersection or Euclidean may be faster
|
||||
- Chi-squared often works better
|
||||
- Earth mover’s distance is good for when nearby bins represent similar values
|
||||
|
||||
#### SIFT vector formation
|
||||
|
||||
Computed on rotated and scaled version of window according to computed orientation & scale
|
||||
|
||||
- resample the window
|
||||
|
||||
Based on gradients weighted by a Gaussian of variance half the window (for smooth falloff)
|
||||
|
||||
4x4 array of gradient orientation histogram weighted by magnitude
|
||||
|
||||
8 orientations x 4x4 array = 128 dimensions
|
||||
|
||||
Motivation: some sensitivity to spatial layout, but not too much.
|
||||
|
||||
For matching:
|
||||
|
||||
- Extraordinarily robust detection and description technique
|
||||
- Can handle changes in viewpoint
|
||||
- Up to about 60 degree out-of-plane rotation
|
||||
- Can handle significant changes in illumination
|
||||
- Sometimes even day vs. night
|
||||
- Fast and efficient—can run in real time
|
||||
- Lots of code available
|
||||
|
||||
#### SURF
|
||||
|
||||
- Fast approximation of SIFT idea
|
||||
- Efficient computation by 2D box filters & integral images
|
||||
- 6 times faster than SIFT
|
||||
- Equivalent quality for object identification
|
||||
|
||||
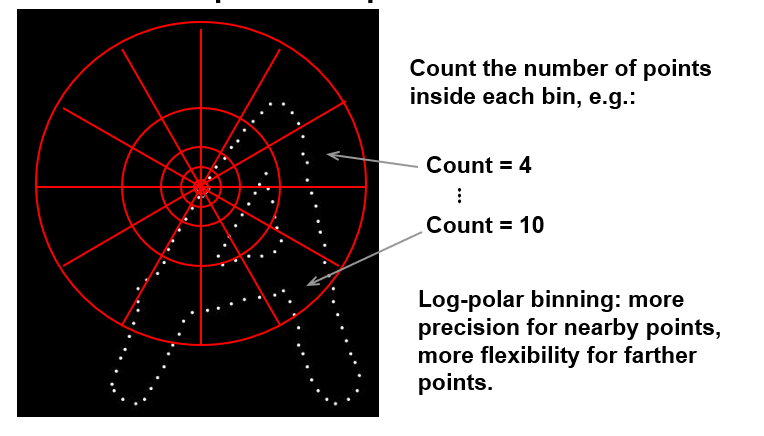
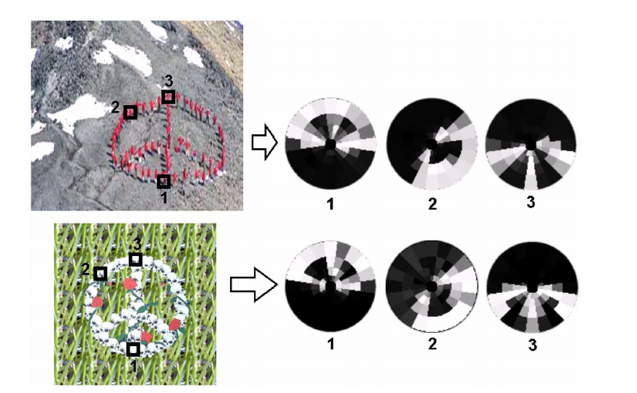
#### Shape context
|
||||
|
||||
|
||||
|
||||
#### Self-similarity Descriptor
|
||||
|
||||
|
||||
|
||||
## Local feature matching
|
||||
|
||||
### Matching
|
||||
|
||||
Simplest approach: Pick the nearest neighbor. Threshold on absolute distance
|
||||
|
||||
Problem: Lots of self similarity in many photos
|
||||
|
||||
Solution: Nearest neighbor with low ratio test
|
||||
|
||||
|
||||
|
||||
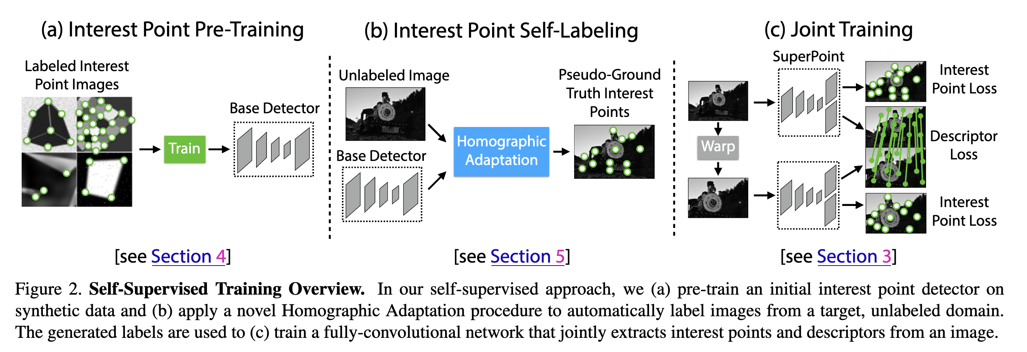
## Deep Learning for Correspondence Estimation
|
||||
|
||||
|
||||
|
||||
## Optical Flow
|
||||
|
||||
### Field
|
||||
|
||||
Motion field: the projection of the 3D scene motion into the image
|
||||
Magnitude of vectors is determined by metric motion
|
||||
Only caused by motion
|
||||
|
||||
Optical flow: the apparent motion of brightness patterns in the image
|
||||
Magnitude of vectors is measured in pixels
|
||||
Can be caused by lightning
|
||||
|
||||
### Brightness constancy constraint, aperture problem
|
||||
|
||||
Machine Learning Approach
|
||||
|
||||
- Collect examples of inputs and outputs
|
||||
- Design a prediction model suitable for the task
|
||||
- Invariances, Equivariances; Complexity; Input and Output shapes and semantics
|
||||
- Specify loss functions and train model
|
||||
- Limitations: Requires training the model; Requires a sufficiently complete training dataset; Must re-learn known facts; Higher computational complexity
|
||||
|
||||
Optimization Approach
|
||||
|
||||
- Define properties we expect to hold for a correct solution
|
||||
- Translate properties into a cost function
|
||||
- Derive an algorithm to solve for the cost function
|
||||
- Limitations: Often requires making overly simple assumptions on properties; Some tasks can’t be easily defined
|
||||
|
||||
Given frames at times $t-1$ and $t$, estimate the apparent motion field $u(x,y)$ and $v(x,y)$ between them
|
||||
Brightness constancy constraint: projection of the same point looks the same in every frame
|
||||
|
||||
$$
|
||||
I(x,y,t-1) = I(x+u(x,y),y+v(x,y),t)
|
||||
$$
|
||||
|
||||
Additional assumptions:
|
||||
|
||||
- Small motion: points do not move very far
|
||||
- Spatial coherence: points move like their neighbors
|
||||
|
||||
Trick for solving:
|
||||
|
||||
Brightness constancy constraint:
|
||||
|
||||
$$
|
||||
I(x,y,t-1) = I(x+u(x,y),y+v(x,y),t)
|
||||
$$
|
||||
|
||||
Linearize the right-hand side using Taylor expansion:
|
||||
|
||||
$$
|
||||
I(x,y,t-1) \approx I(x,y,t) + I_x u(x,y) + I_y v(x,y)
|
||||
$$
|
||||
|
||||
$$
|
||||
I_x u(x,y) + I_y v(x,y) + I(x,y,t) - I(x,y,t-1) = 0
|
||||
$$
|
||||
|
||||
Hence,
|
||||
|
||||
$$
|
||||
I_x u(x,y) + I_y v(x,y) + I_t = 0
|
||||
$$
|
||||
|
||||
|
||||
|
||||
|
||||
Reference in New Issue
Block a user