update
This commit is contained in:
@@ -1 +1,2 @@
|
|||||||
# CSE510 Deep Reinforcement Learning
|
# CSE5313 Coding and information theory for data science
|
||||||
|
|
||||||
|
|||||||
@@ -41,12 +41,15 @@ $\beta$ is a hyperparameter that scale the loss of the camera orientation so tha
|
|||||||
|
|
||||||
### Network architecture
|
### Network architecture
|
||||||
|
|
||||||
Based on GoogleNet (SOTA in 2014), but with a few changes:
|
Based on GoogLeNet (SOTA in 2014), but with a few changes:
|
||||||
|
|
||||||
- Replace all three softmax classifiers with affine regressors.
|
- Replace all three softmax classifiers with affine regressors.
|
||||||
- Insert another fully connected layer before final regressor of feature size 2048
|
- Insert another fully connected layer before final regressor of feature size 2048
|
||||||
- At test time, normalize the quaternion to unit length.
|
- At test time, normalize the quaternion to unit length.
|
||||||
|
|
||||||
|
<details>
|
||||||
|
<summary>Architecture</summary>
|
||||||
|
|
||||||
```python
|
```python
|
||||||
from network import Network
|
from network import Network
|
||||||
|
|
||||||
@@ -259,7 +262,7 @@ class GoogLeNet(Network):
|
|||||||
.fc(4, relu=False, name='cls3_fc_pose_wpqr'))
|
.fc(4, relu=False, name='cls3_fc_pose_wpqr'))
|
||||||
```
|
```
|
||||||
|
|
||||||
|
</details>
|
||||||
|
|
||||||
## Unsupervised Learning of Depth and Ego-Motion From Video
|
## Unsupervised Learning of Depth and Ego-Motion From Video
|
||||||
|
|
||||||
@@ -267,6 +270,24 @@ class GoogLeNet(Network):
|
|||||||
|
|
||||||
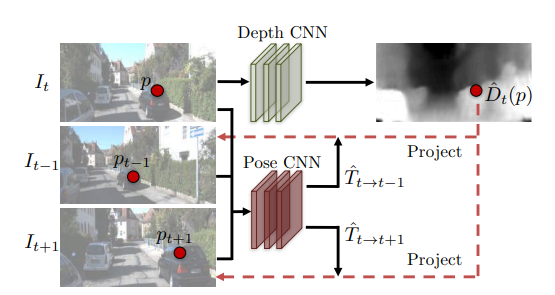
[link to the paper](https://openaccess.thecvf.com/content_cvpr_2017/papers/Zhou_Unsupervised_Learning_of_CVPR_2017_paper.pdf)
|
[link to the paper](https://openaccess.thecvf.com/content_cvpr_2017/papers/Zhou_Unsupervised_Learning_of_CVPR_2017_paper.pdf)
|
||||||
|
|
||||||
|
This is a method that estimates both depth and camera pose motion from a single video using CNN.
|
||||||
|
|
||||||
|
Jointly training a single-view depth CNN and a camera pose estimation CNN form unlabelled monocular video sequences.
|
||||||
|
|
||||||
|
|
||||||
|
|
||||||
|
### View synthesis as supervision
|
||||||
|
|
||||||
|
Notice that in mo
|
||||||
|
|
||||||
|
## Unsupervised Monocular Depth Estimation with Left-Right Consistency
|
||||||
|
|
||||||
|
(CVPR 2017)
|
||||||
|
|
||||||
|
[link to the paper](https://arxiv.org/pdf/1609.03677)
|
||||||
|
|
||||||
|
This is a method that use pair of images as Left and Right eye to estimate depth. Increased consistency by flipping the right-left relation.
|
||||||
|
|
||||||
## GeoNet
|
## GeoNet
|
||||||
|
|
||||||
Unsupervised Learning of Dense Depth, Optical Flow and Camera Pose (CVPR 2018)
|
Unsupervised Learning of Dense Depth, Optical Flow and Camera Pose (CVPR 2018)
|
||||||
@@ -283,6 +304,12 @@ Depth Estimation from single monocular image.
|
|||||||
|
|
||||||
### Rigid structure constructor
|
### Rigid structure constructor
|
||||||
|
|
||||||
|
Combines the DepthNet and PoseNet to estimate the depth and camera pose motion from [Unsupervised Learning of Depth and Ego-Motion From Video](#unsupervised-learning-of-depth-and-ego-motion-from-video).
|
||||||
|
|
||||||
### Non-rigid motion localizer
|
### Non-rigid motion localizer
|
||||||
|
|
||||||
|
Use [Left-right consistency](#unsupervised-monocular-depth-estimation-with-left-right-consistency) to estimate the non-rigid motion by training the ResFlowNet.
|
||||||
|
|
||||||
### Geometric consistency enforcement
|
### Geometric consistency enforcement
|
||||||
|
|
||||||
|
Finally, we use an additional geometric consistency enforcement to handle non-Lambertian surfaces (e.g., metal, plastic, etc.).
|
||||||
|
|||||||
@@ -6,7 +6,8 @@ Here is a list of topics we will cover in this course:
|
|||||||
|
|
||||||
**CSE 5519 (Fall 2025)**
|
**CSE 5519 (Fall 2025)**
|
||||||
|
|
||||||
> **Notes:**
|
> [!NOTE]
|
||||||
|
>
|
||||||
> Papers tagged with a 🌟 are the recommended main papers.
|
> Papers tagged with a 🌟 are the recommended main papers.
|
||||||
> You can suggest alternate papers (as long as they are important and aligned with the theme). You must email the instructor your rationale well in advance of your presentation date to obtain approval.
|
> You can suggest alternate papers (as long as they are important and aligned with the theme). You must email the instructor your rationale well in advance of your presentation date to obtain approval.
|
||||||
|
|
||||||
|
|||||||
BIN
public/CSE5519/Unsupervised_Learning_DepthNet_PoseNet.png
Normal file
BIN
public/CSE5519/Unsupervised_Learning_DepthNet_PoseNet.png
Normal file
{kind=link}
Binary file not shown.
|
After Width: | Height: | Size: 115 KiB |
Reference in New Issue
Block a user