upgrade structures and migrate to nextra v4
This commit is contained in:
260
content/CSE559A/CSE559A_L22.md
Normal file
260
content/CSE559A/CSE559A_L22.md
Normal file
@@ -0,0 +1,260 @@
|
||||
# CSE559A Lecture 22
|
||||
|
||||
## Continue on Robust Fitting of parametric models
|
||||
|
||||
### RANSAC
|
||||
|
||||
#### Definition: RANdom SAmple Consensus
|
||||
|
||||
RANSAC is a method to fit a model to a set of data points.
|
||||
|
||||
It is a non-deterministic algorithm that can be used to fit a model to a set of data points.
|
||||
|
||||
Pros:
|
||||
|
||||
- Simple and general
|
||||
- Applicable to many different problems
|
||||
- Often works well in practice
|
||||
|
||||
Cons:
|
||||
|
||||
- Lots of parameters to set
|
||||
- Number of iterations grows exponentially as outlier ratio increases
|
||||
- Can't always get a good initialization of the model based on the minimum number of samples.
|
||||
|
||||
### Hough Transform
|
||||
|
||||
Use point-line duality to find lines.
|
||||
|
||||
In practice, we don't use (m,b) parameterization.
|
||||
|
||||
Instead, we use polar parameterization:
|
||||
|
||||
$$
|
||||
\rho = x \cos \theta + y \sin \theta
|
||||
$$
|
||||
|
||||
Algorithm outline:
|
||||
|
||||
- Initialize accumulator $H$ to all zeros
|
||||
- For each feature point $(x,y)$
|
||||
- For $\theta = 0$ to $180$
|
||||
- $\rho = x \cos \theta + y \sin \theta$
|
||||
- $H(\theta, \rho) += 1$
|
||||
- Find the value(s) of $(\theta, \rho)$ where $H(\theta, \rho)$ is a local maximum (perform NMS on the accumulator array)
|
||||
- The detected line in the image is given by $\rho = x \cos \theta + y \sin \theta$
|
||||
|
||||
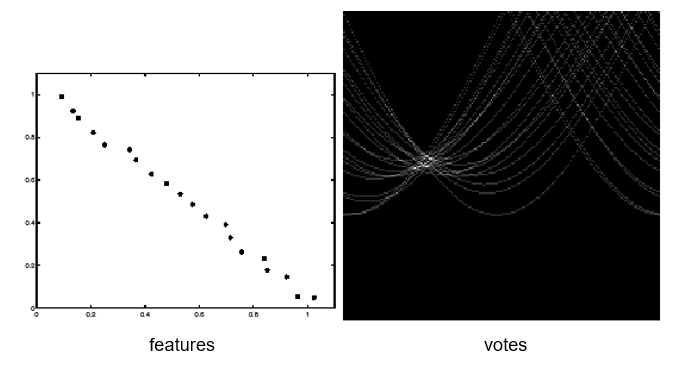
#### Effect of noise
|
||||
|
||||
|
||||
|
||||
Noise makes the peak fuzzy.
|
||||
|
||||
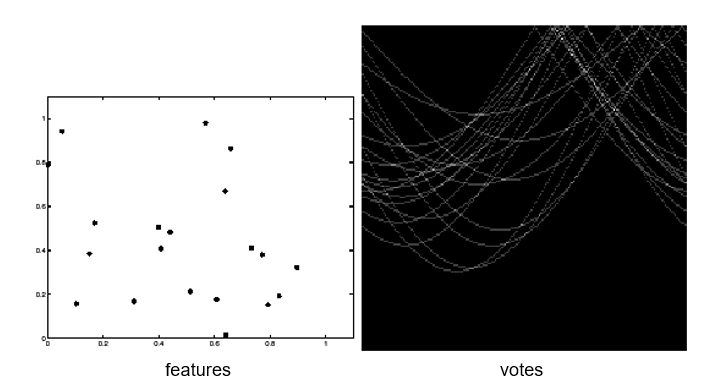
#### Effect of outliers
|
||||
|
||||
|
||||
|
||||
Outliers can break the peak.
|
||||
|
||||
#### Pros and Cons
|
||||
|
||||
Pros:
|
||||
|
||||
- Can deal with non-locality and occlusion
|
||||
- Can detect multiple instances of a model
|
||||
- Some robustness to noise: noise points unlikely to contribute consistently to any single bin
|
||||
- Leads to a surprisingly general strategy for shape localization (more on this next)
|
||||
|
||||
Cons:
|
||||
|
||||
- Complexity increases exponentially with the number of model parameters
|
||||
- In practice, not used beyond three or four dimensions
|
||||
- Non-target shapes can produce spurious peaks in parameter space
|
||||
- It's hard to pick a good grid size
|
||||
|
||||
### Generalize Hough Transform
|
||||
|
||||
Template representation: for each type of landmark point, store all possible displacement vectors towards the center
|
||||
|
||||
Detecting the template:
|
||||
|
||||
For each feature in a new image, look up that feature type in the model and vote for the possible center locations associated with that type in the model
|
||||
|
||||
#### Implicit shape models
|
||||
|
||||
Training:
|
||||
|
||||
- Build codebook of patches around extracted interest points using clustering
|
||||
- Map the patch around each interest point to closest codebook entry
|
||||
- For each codebook entry, store all positions it was found, relative to object center
|
||||
|
||||
Testing:
|
||||
|
||||
- Given test image, extract patches, match to codebook entry
|
||||
- Cast votes for possible positions of object center
|
||||
- Search for maxima in voting space
|
||||
- Extract weighted segmentation mask based on stored masks for the codebook occurrences
|
||||
|
||||
## Image alignment
|
||||
|
||||
### Affine transformation
|
||||
|
||||
Simple fitting procedure: linear least squares
|
||||
Approximates viewpoint changes for roughly planar objects and roughly orthographic cameras
|
||||
Can be used to initialize fitting for more complex models
|
||||
|
||||
Fitting an affine transformation:
|
||||
|
||||
$$
|
||||
\begin{bmatrix}
|
||||
&&&\cdots\\
|
||||
x_i & y_i & 0&0&1&0\\
|
||||
0&0&x_i&y_i&0&1\\
|
||||
&&&\cdots\\
|
||||
\end{bmatrix}
|
||||
\begin{bmatrix}
|
||||
m_1\\
|
||||
m_2\\
|
||||
m_3\\
|
||||
m_4\\
|
||||
t_1\\
|
||||
t_2\\
|
||||
\end{bmatrix}
|
||||
=
|
||||
\begin{bmatrix}
|
||||
\cdots\\
|
||||
\end{bmatrix}
|
||||
$$
|
||||
|
||||
Only need 3 points to solve for 6 parameters.
|
||||
|
||||
### Homography
|
||||
|
||||
Recall that
|
||||
|
||||
$$
|
||||
x' = \frac{a x + b y + c}{g x + h y + i}, \quad y' = \frac{d x + e y + f}{g x + h y + i}
|
||||
$$
|
||||
|
||||
Use 2D homogeneous coordinates:
|
||||
|
||||
$(x,y) \rightarrow \begin{pmatrix}x \\ y \\ 1\end{pmatrix}$
|
||||
|
||||
$\begin{pmatrix}x\\y\\w\end{pmatrix} \rightarrow (x/w,y/w)$
|
||||
|
||||
Reminder: all homogeneous coordinate vectors that are (non-zero) scalar multiples of each other represent the same point
|
||||
|
||||
|
||||
Equation for homography in homogeneous coordinates:
|
||||
|
||||
$$
|
||||
\begin{pmatrix}
|
||||
x' \\
|
||||
y' \\
|
||||
1
|
||||
\end{pmatrix}
|
||||
\cong
|
||||
\begin{pmatrix}
|
||||
h_{11} & h_{12} & h_{13} \\
|
||||
h_{21} & h_{22} & h_{23} \\
|
||||
h_{31} & h_{32} & h_{33}
|
||||
\end{pmatrix}
|
||||
\begin{pmatrix}
|
||||
x \\
|
||||
y \\
|
||||
1
|
||||
\end{pmatrix}
|
||||
$$
|
||||
|
||||
Constraint from a match $(x_i,x_i')$, $x_i'\cong Hx_i$
|
||||
|
||||
How can we get rid of the scale ambiguity?
|
||||
|
||||
Cross product trick:$x_i' × Hx_i=0$
|
||||
|
||||
The cross product is defined as:
|
||||
|
||||
$$
|
||||
\begin{pmatrix}a\\b\\c\end{pmatrix} \times \begin{pmatrix}a'\\b'\\c'\end{pmatrix} = \begin{pmatrix}bc'-b'c\\ca'-c'a\\ab'-a'b\end{pmatrix}
|
||||
$$
|
||||
|
||||
Let $h_1^T, h_2^T, h_3^T$ be the rows of $H$. Then
|
||||
|
||||
$$
|
||||
x_i' × Hx_i=\begin{pmatrix}
|
||||
x_i' \\
|
||||
y_i' \\
|
||||
1
|
||||
\end{pmatrix} \times \begin{pmatrix}
|
||||
h_1^T x_i \\
|
||||
h_2^T x_i \\
|
||||
h_3^T x_i
|
||||
\end{pmatrix}
|
||||
=
|
||||
\begin{pmatrix}
|
||||
y_i' h_3^T x_i−h_2^T x_i \\
|
||||
h_1^T x_i−x_i' h_3^T x_i \\
|
||||
x_i' h_2^T x_i−y_i' h_1^T x_i
|
||||
\end{pmatrix}
|
||||
$$
|
||||
|
||||
Constraint from a match $(x_i,x_i')$:
|
||||
|
||||
$$
|
||||
x_i' × Hx_i=\begin{pmatrix}
|
||||
x_i' \\
|
||||
y_i' \\
|
||||
1
|
||||
\end{pmatrix} \times \begin{pmatrix}
|
||||
h_1^T x_i \\
|
||||
h_2^T x_i \\
|
||||
h_3^T x_i
|
||||
\end{pmatrix}
|
||||
=
|
||||
\begin{pmatrix}
|
||||
y_i' h_3^T x_i−h_2^T x_i \\
|
||||
h_1^T x_i−x_i' h_3^T x_i \\
|
||||
x_i' h_2^T x_i−y_i' h_1^T x_i
|
||||
\end{pmatrix}
|
||||
$$
|
||||
|
||||
Rearranging the terms:
|
||||
|
||||
$$
|
||||
\begin{bmatrix}
|
||||
0^T &-x_i^T &y_i' x_i^T \\
|
||||
x_i^T &0^T &-x_i' x_i^T \\
|
||||
y_i' x_i^T &x_i' x_i^T &0^T
|
||||
\end{bmatrix}
|
||||
\begin{bmatrix}
|
||||
h_1 \\
|
||||
h_2 \\
|
||||
h_3
|
||||
\end{bmatrix} = 0
|
||||
$$
|
||||
|
||||
These equations aren't independent! So, we only need two.
|
||||
|
||||
### Robust alignment
|
||||
|
||||
#### Descriptor-based feature matching
|
||||
|
||||
Extract features
|
||||
Compute putative matches
|
||||
Loop:
|
||||
|
||||
- Hypothesize transformation $T$
|
||||
- Verify transformation (search for other matches consistent with $T$)
|
||||
|
||||
#### RANSAC
|
||||
|
||||
Even after filtering out ambiguous matches, the set of putative matches still contains a very high percentage of outliers
|
||||
|
||||
RANSAC loop:
|
||||
|
||||
- Randomly select a seed group of matches
|
||||
- Compute transformation from seed group
|
||||
- Find inliers to this transformation
|
||||
- If the number of inliers is sufficiently large, re-compute least-squares estimate of transformation on all of the inliers
|
||||
|
||||
At the end, keep the transformation with the largest number of inliers
|
||||
Reference in New Issue
Block a user