2.4 KiB
2.4 KiB
CSE510 Deep Reinforcement Learning (Lecture 19)
Model learning with high-dimensional observations
- Learning model in a latent space with observation reconstruction
- Learning model in a latent space without reconstruction
Learn in Latent Space: Dreamer
Learning embedding of images & dynamics model (jointly)
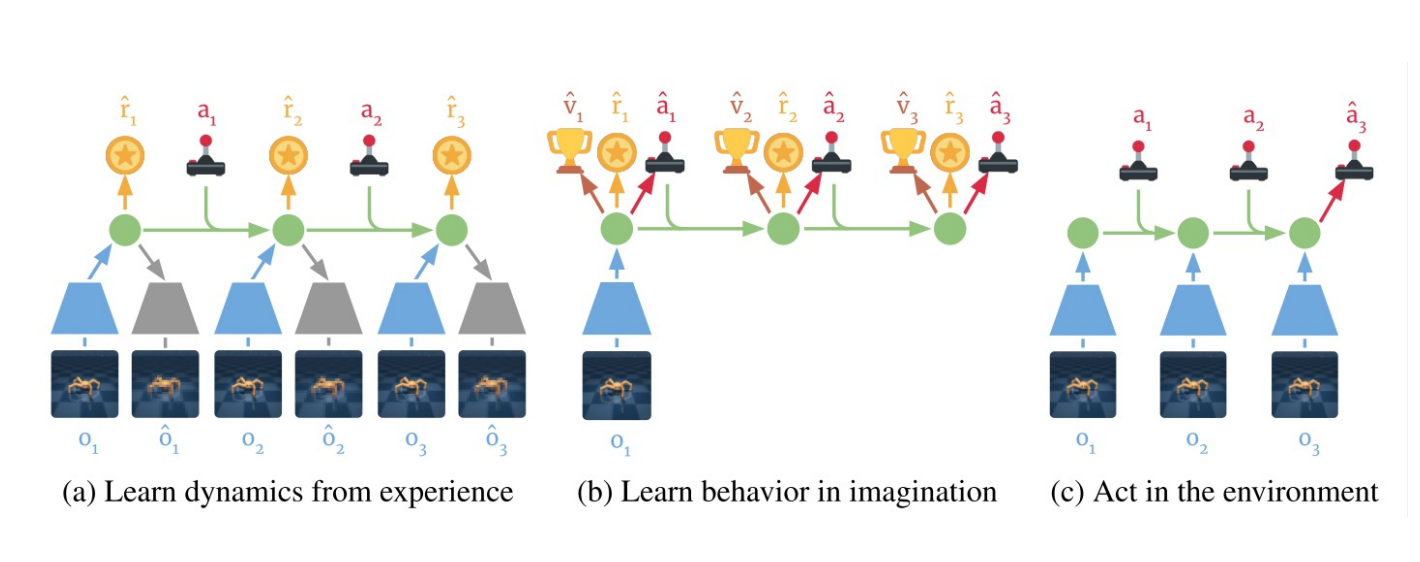
Representation model: p_\theta(s_t|s_{t-1}, a_{t-1}, o_t)
Observation model: q_\theta(o_t|s_t)
Reward model: q_\theta(r_t|s_t)
Transition model: q_\theta(s_t| s_{t-1}, a_{t-1}).
Variational evidence lower bound (ELBO) objective:
\mathcal{J}_{REC}\doteq \mathbb{E}_{p}\left(\sum_t(\mathcal{J}_O^t+\mathcal{J}_R^t+\mathcal{J}_D^t)\right)
where
\mathcal{J}_O^t\doteq \ln q(o_t|s_t)
\mathcal{J}_R^t\doteq \ln q(r_t|s_t)
\mathcal{J}_D^t\doteq -\beta \operatorname{KL}(p(s_t|s_{t-1}, a_{t-1}, o_t)||q(s_t|s_{t-1}, a_{t-1}))
More versions for Dreamer
Latest is V3, link to the paper
Learn in Latent Space
- Pros
- Learn visual skill efficiently (using relative simple networks)
- Cons
- Using autoencoder might not recover the right representation
- Not necessarily suitable for model-based methods
- Embedding is often not a good state representation without using history observations
Planning with Value Prediction Network (VPN)
Idea: generating trajectories by following $\epsilon$-greedy policy based on the planning method
Q-value calculated from $d$-step planning is defined as:
Q_\theta^d(s,o)=r+\gamma V_\theta^{d}(s')
V_\theta^{d}(s)=\begin{cases}
V_\theta(s) & \text{if } d=1\\
\frac{1}{d}V_\theta(s)+\frac{d-1}{d}\max_{o} Q_\theta^{d-1}(s,o)& \text{if } d>1
\end{cases}
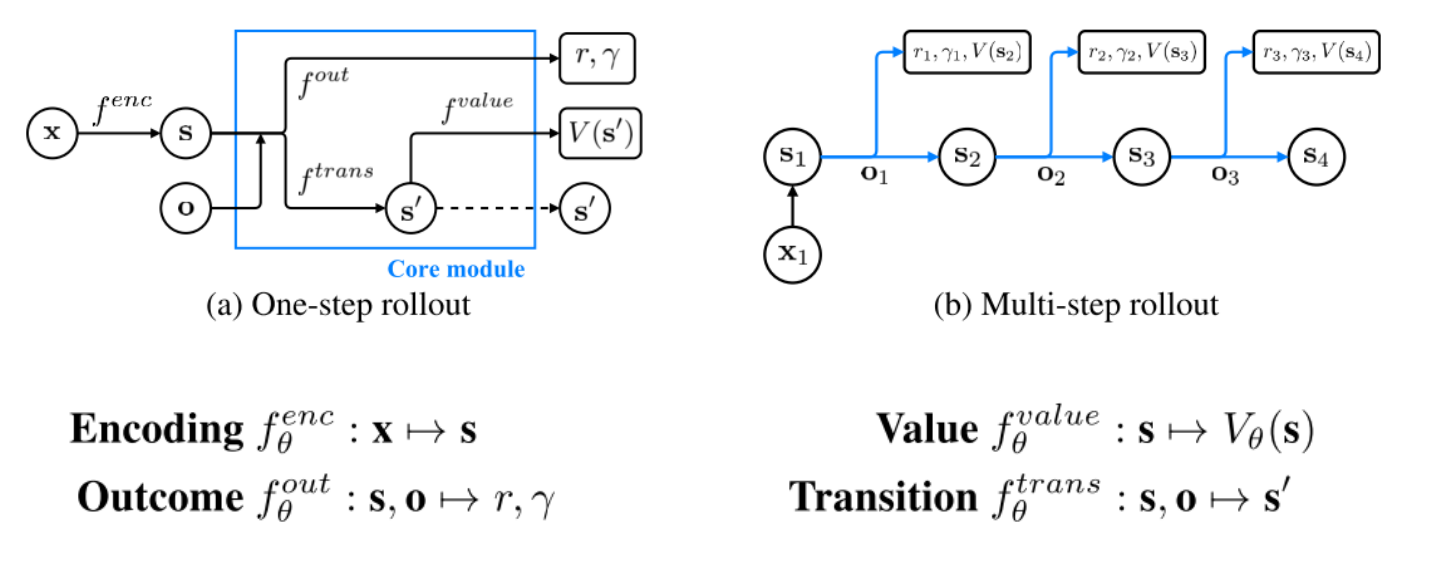
Given an n-step trajectory x_1, o_1, r_1, \gamma_1, x_2, o_2, r_2, \gamma_2, ..., x_{n+1} generated by the $\epsilon$-greedy policy, k-step predictions are defined as follows:
s_t^k=\begin{cases}
f^{enc}_\theta(x_t) & \text{if } k=0\\
f^{trans}_\theta(s_{t-1}^{k-1},o_{t-1}) & \text{if } k>0
\end{cases}
v_t^k=f^{value}_\theta(s_t^k)
r_t^k,\gamma_t^k=f^{out}_\theta(s_t^{k-1},o_t)
\mathcal{L}_t=\sum_{l=1}^k(R_t-v_t^l)^2+(r_t-r_t^l)^2+(\gamma_t-\gamma_t^l)^2\text{ where } R_t=\begin{cases}
r_t+\gamma_t R_{t+1} & \text{if } t\leq n\\
\max_{o} Q_{\theta-}^d(s_{n+1},o)& \text{if } t=n+1
\end{cases}
MuZero
beats AlphaZero