65 lines
1.8 KiB
Markdown
65 lines
1.8 KiB
Markdown
# CSE559A Lecture 20
|
||
|
||
## Local feature descriptors
|
||
|
||
Detection: Identify the interest points
|
||
|
||
Description: Extract vector feature descriptor surrounding each interest point.
|
||
|
||
Matching: Determine correspondence between descriptors in two views
|
||
|
||
### Image representation
|
||
|
||
Histogram of oriented gradients (HOG)
|
||
|
||
- Quantization
|
||
- Grids: fast but applicable only with few dimensions
|
||
- Clustering: slower but can quantize data in higher dimensions
|
||
- Matching
|
||
- Histogram intersection or Euclidean may be faster
|
||
- Chi-squared often works better
|
||
- Earth mover’s distance is good for when nearby bins represent similar values
|
||
|
||
#### SIFT vector formation
|
||
|
||
Computed on rotated and scaled version of window according to computed orientation & scale
|
||
|
||
- resample the window
|
||
|
||
Based on gradients weighted by a Gaussian of variance half the window (for smooth falloff)
|
||
|
||
4x4 array of gradient orientation histogram weighted by magnitude
|
||
|
||
8 orientations x 4x4 array = 128 dimensions
|
||
|
||
Motivation: some sensitivity to spatial layout, but not too much.
|
||
|
||
For matching:
|
||
|
||
- Extraordinarily robust detection and description technique
|
||
- Can handle changes in viewpoint
|
||
- Up to about 60 degree out-of-plane rotation
|
||
- Can handle significant changes in illumination
|
||
- Sometimes even day vs. night
|
||
- Fast and efficient—can run in real time
|
||
- Lots of code available
|
||
|
||
#### SURF
|
||
|
||
- Fast approximation of SIFT idea
|
||
- Efficient computation by 2D box filters & integral images
|
||
- 6 times faster than SIFT
|
||
- Equivalent quality for object identification
|
||
|
||
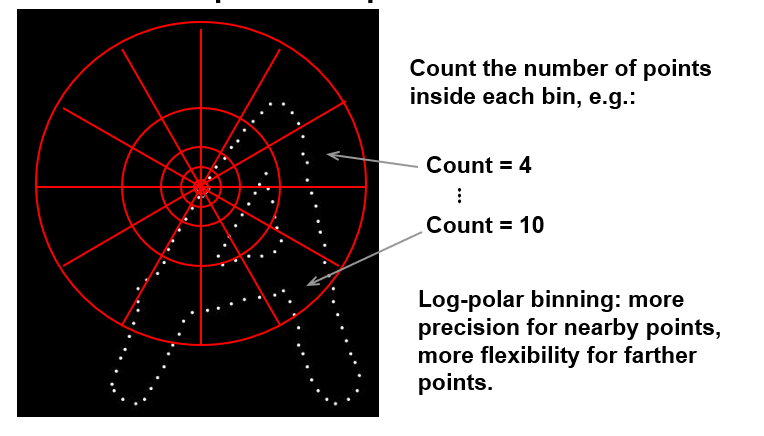
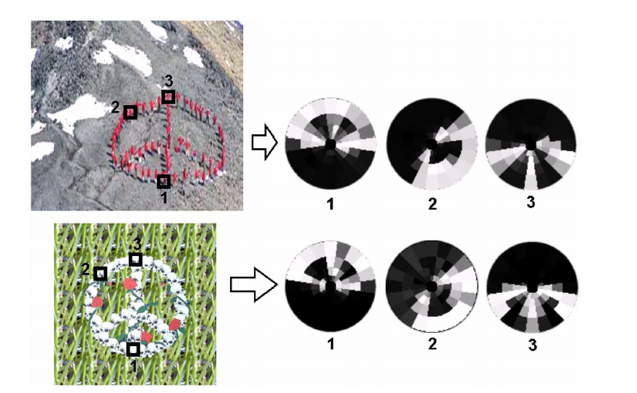
#### Shape context
|
||
|
||
|
||
|
||
#### Self-similarity Descriptor
|
||
|
||
|
||
|
||
## Local feature matching
|
||
|
||
### Matching
|