115 lines
3.4 KiB
Markdown
115 lines
3.4 KiB
Markdown
# CSE559A Lecture 16
|
|
|
|
## Dense image labelling
|
|
|
|
### Semantic segmentation
|
|
|
|
Use one-hot encoding to represent the class of each pixel.
|
|
|
|
### General Network design
|
|
|
|
Design a network with only convolutional layers, make predictions for all pixels at once.
|
|
|
|
Can the network operate at full image resolution?
|
|
|
|
Practical solution: first downsample, then upsample
|
|
|
|
### Outline
|
|
|
|
- Upgrading a Classification Network to Segmentation
|
|
- Operations for dense prediction
|
|
- Transposed convolutions, unpooling
|
|
- Architectures for dense prediction
|
|
- DeconvNet, U-Net, "U-Net"
|
|
- Instance segmentation
|
|
- Mask R-CNN
|
|
- Other dense prediction problems
|
|
|
|
### Fully Convolutional Networks
|
|
|
|
"upgrading" a classification network to a dense prediction network
|
|
|
|
1. Covert "fully connected" layers to 1x1 convolutions
|
|
2. Make the input image larger
|
|
3. Upsample the output
|
|
|
|
Start with an existing classification CNN ("an encoder")
|
|
|
|
Then use bilinear interpolation and transposed convolutions to make full resolution.
|
|
|
|
### Operations for dense prediction
|
|
|
|
#### Transposed Convolutions
|
|
|
|
Use the filter to "paint" in the output: place copies of the filter on the output, multiply by corresponding value in the input, sum where copies of the filter overlap
|
|
|
|
We can increase the resolution of the output by using a larger stride in the convolution.
|
|
|
|
- For stride 2, dilate the input by inserting rows and columns of zeros between adjacent entries, convolve with flipped filter
|
|
- Sometimes called convolution with fractional input stride 1/2
|
|
|
|
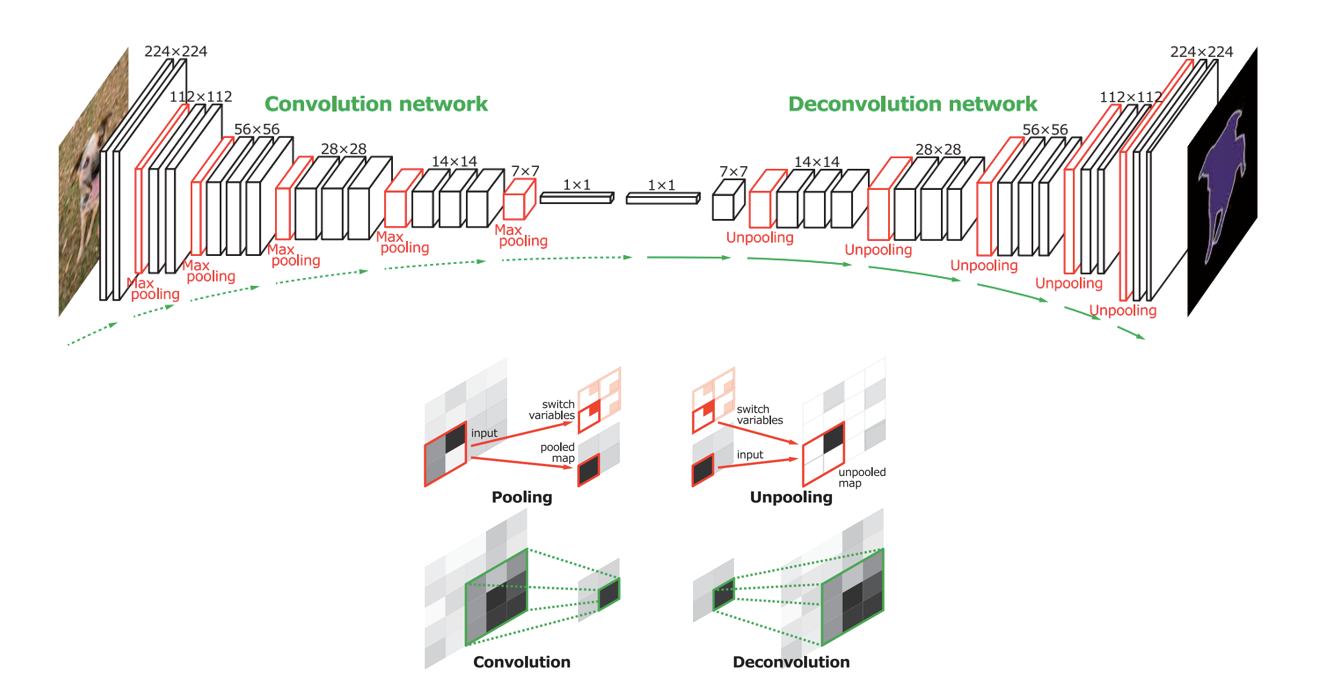
#### Unpooling
|
|
|
|
Max unpooling:
|
|
|
|
- Copy the maximum value in the input region to all locations in the output
|
|
- Use the location of the maximum value to know where to put the value in the output
|
|
|
|
Nearest neighbor unpooling:
|
|
|
|
- Copy the maximum value in the input region to all locations in the output
|
|
- Use the location of the maximum value to know where to put the value in the output
|
|
|
|
### Architectures for dense prediction
|
|
|
|
#### DeconvNet
|
|
|
|
|
|
|
|
_How the information about location is encoded in the network?_
|
|
|
|
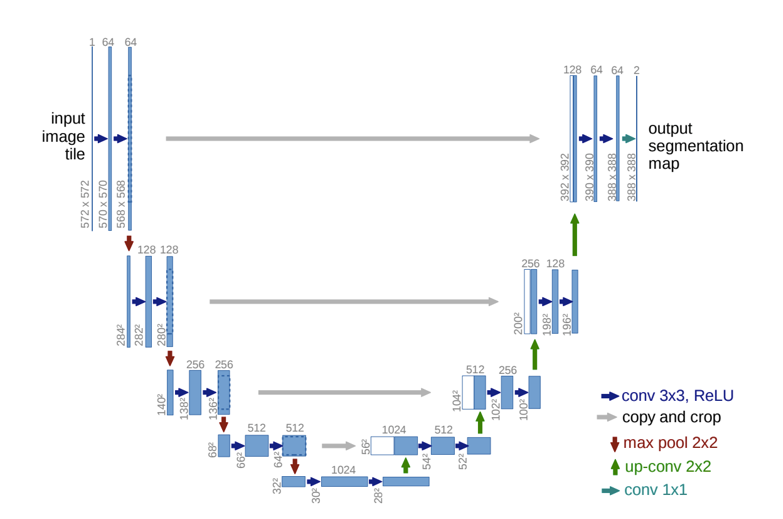
#### U-Net
|
|
|
|
|
|
|
|
- Like FCN, fuse upsampled higher-level feature maps with higher-res, lower-level feature maps (like residual connections)
|
|
- Unlike FCN, fuse by concatenation, predict at the end
|
|
|
|
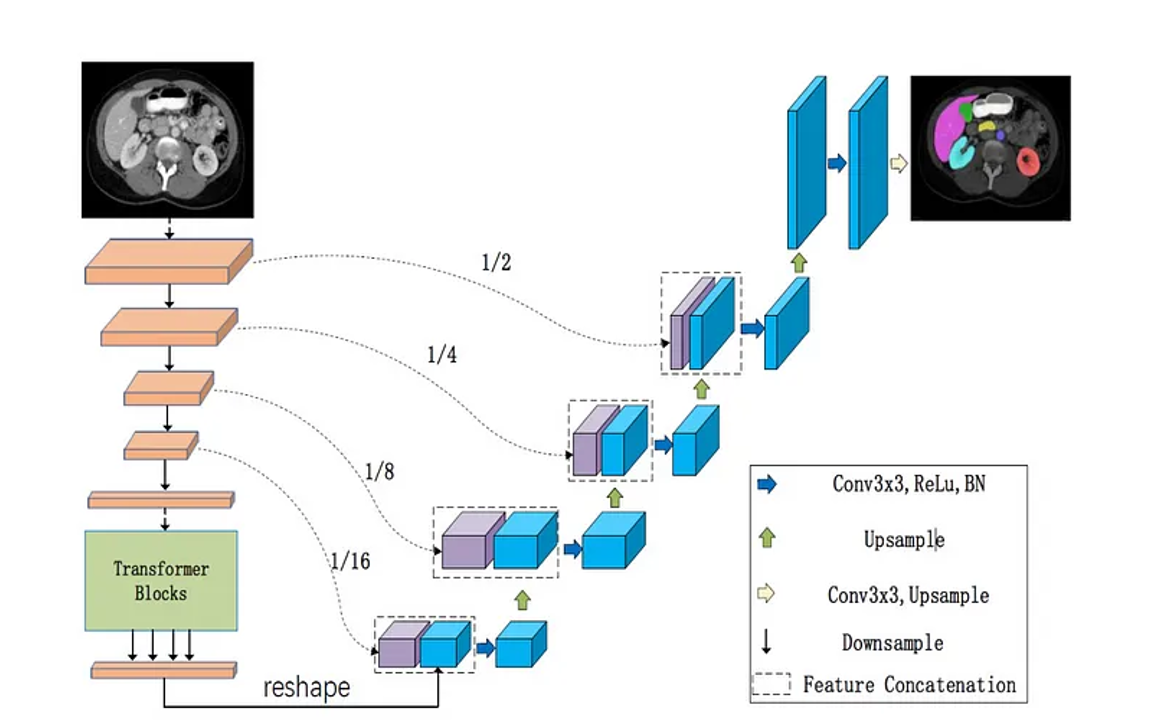
#### Extended U-Net Architecture
|
|
|
|
Many variants of U-Net would replace the "encoder" of the U-Net with other architectures.
|
|
|
|
|
|
|
|
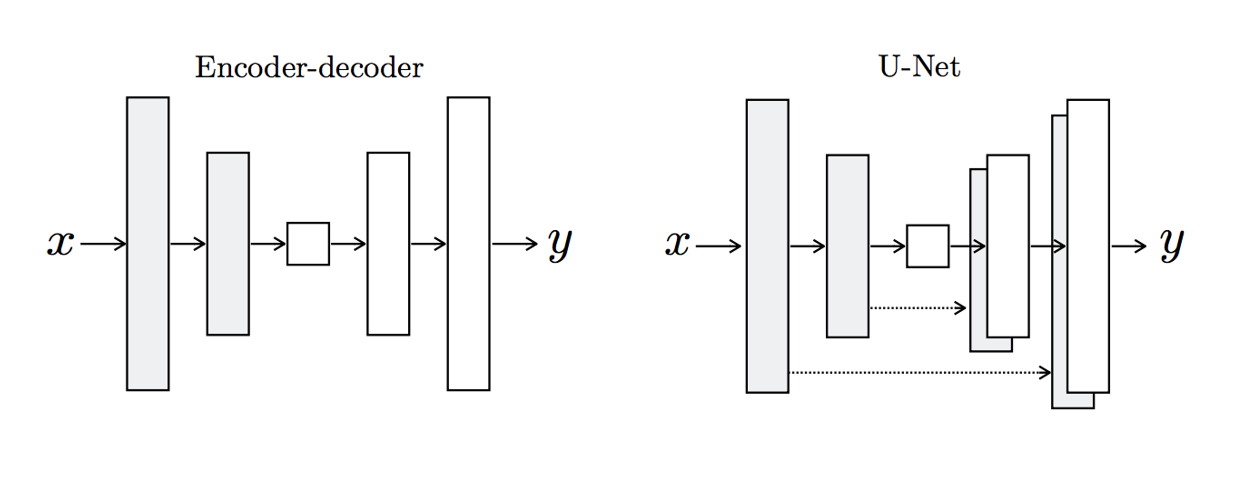
##### Encoder/Decoder v.s. U-Net
|
|
|
|
|
|
|
|
### Instance Segmentation
|
|
|
|
#### Mask R-CNN
|
|
|
|
Mask R-CNN = Faster R-CNN + FCN on Region of Interest
|
|
|
|
### Extend to keypoint prediction?
|
|
|
|
- Use a similar architecture to Mask R-CNN
|
|
|
|
_Continue on Tuesday_
|
|
|
|
### Other tasks
|
|
|
|
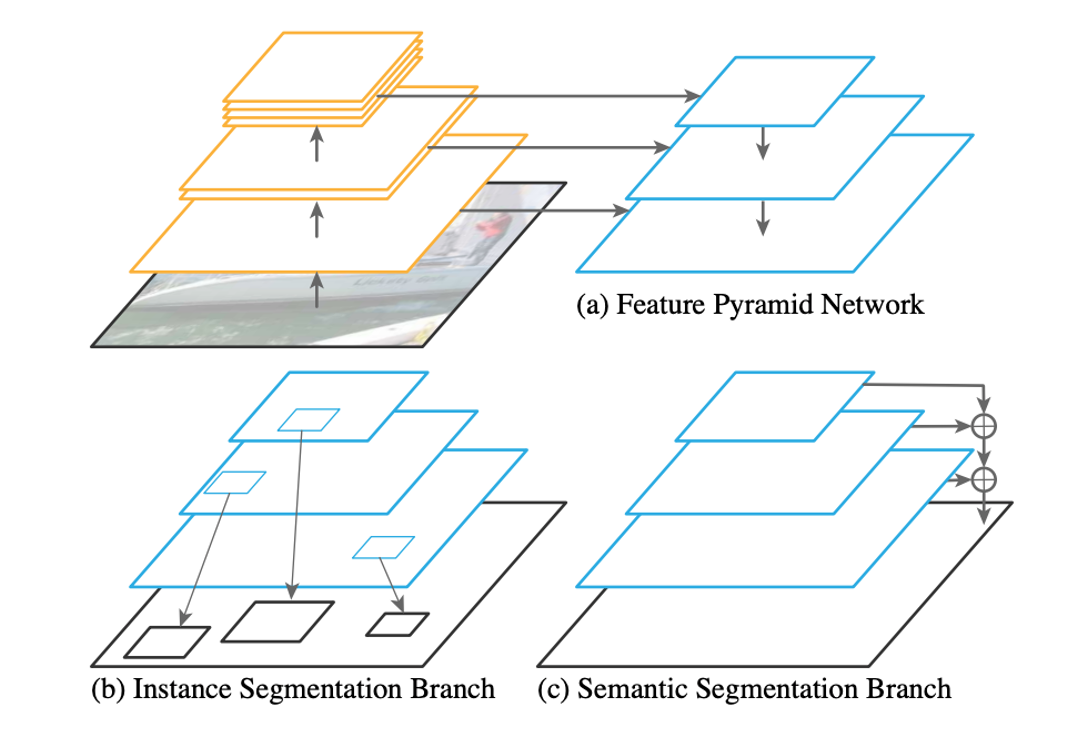
#### Panoptic feature pyramid network
|
|
|
|
|
|
|
|
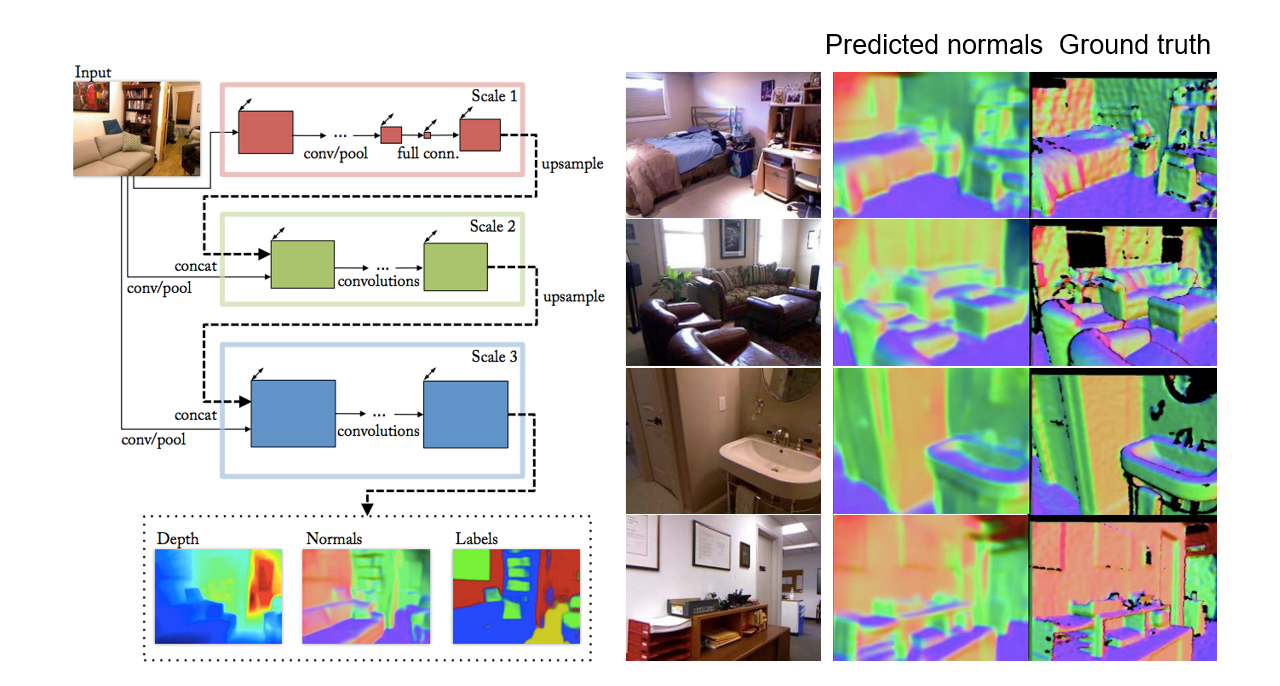
#### Depth and normal estimation
|
|
|
|
|
|
|
|
D. Eigen and R. Fergus, Predicting Depth, Surface Normals and Semantic Labels with a Common Multi-Scale Convolutional Architecture, ICCV 2015
|
|
|
|
#### Colorization
|
|
|
|
R. Zhang, P. Isola, and A. Efros, Colorful Image Colorization, ECCV 2016
|