2.6 KiB
CSE559A Lecture 9
Continue on ML for computer vision
Backpropagation
Computation graphs
SGD update for each parameter
w_k\gets w_k-\eta\frac{\partial e}{\partial w_k}
e is the error function.
Using the chain rule
Suppose k=1, e=l(f_1(x,w_1),y)
Example: e=(f_1(x,w_1)-y)^2
So h_1=f_1(x,w_1)=w^T_1x, e=l(h_1,y)=(y-h_1)^2
\frac{\partial e}{\partial w_1}=\frac{\partial e}{\partial h_1}\frac{\partial h_1}{\partial w_1}
\frac{\partial e}{\partial h_1}=2(h_1-y)
\frac{\partial h_1}{\partial w_1}=x
\frac{\partial e}{\partial w_1}=2(h_1-y)x
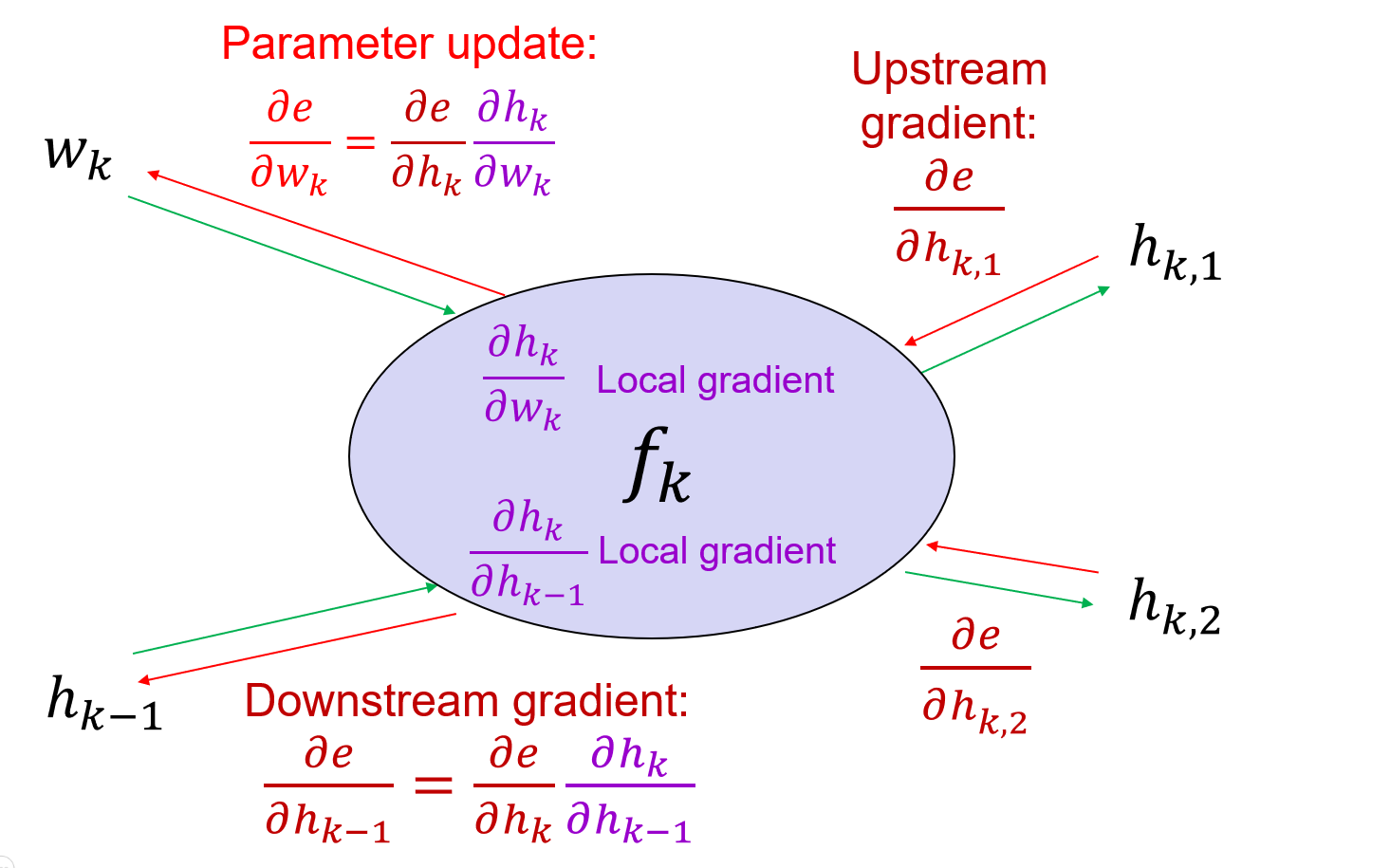
For the general cases,
\frac{\partial e}{\partial w_k}=\frac{\partial e}{\partial h_K}\frac{\partial h_K}{\partial h_{K-1}}\cdots\frac{\partial h_{k+2}}{\partial h_{k+1}}\frac{\partial h_{k+1}}{\partial h_k}\frac{\partial h_k}{\partial w_k}
Where the upstream gradient \frac{\partial e}{\partial h_K} is known, and the local gradient \frac{\partial h_k}{\partial w_k} is known.
General backpropagation algorithm
The adding layer is the gradient distributor layer. The multiplying layer is the gradient switcher layer. The max operation is the gradient router layer.
Simple example: Element-wise operation (ReLU)
f(x)=ReLU(x)=max(0,x)
\frac{\partial z}{\partial x}=\begin{pmatrix}
\frac{\partial z_1}{\partial x_1} & 0 & \cdots & 0 \\
0 & \frac{\partial z_2}{\partial x_2} & \cdots & 0 \\
\vdots & \vdots & \ddots & \vdots \\
0 & 0 & \cdots & \frac{\partial z_n}{\partial x_n}
\end{pmatrix}
Where \frac{\partial z_i}{\partial x_j}=1 if i=j and z_i>0, otherwise \frac{\partial z_i}{\partial x_j}=0.
When \forall x_i<0 then \frac{\partial z}{\partial x}=0 (dead ReLU)
Other examples on ppt.
Convolutional Neural Networks
Basic Convolutional layer
Flatten layer
Fully connected layer, operate on vectorized image.
With the multi-layer perceptron, the neural network trying to fit the templates.
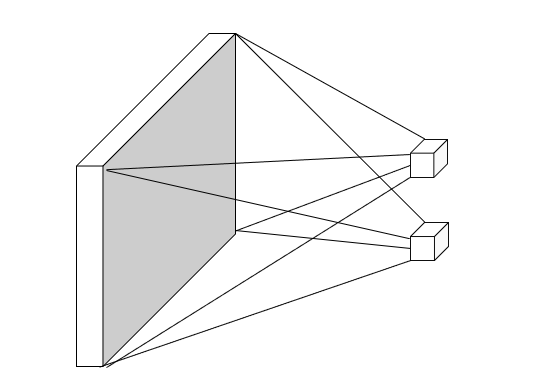
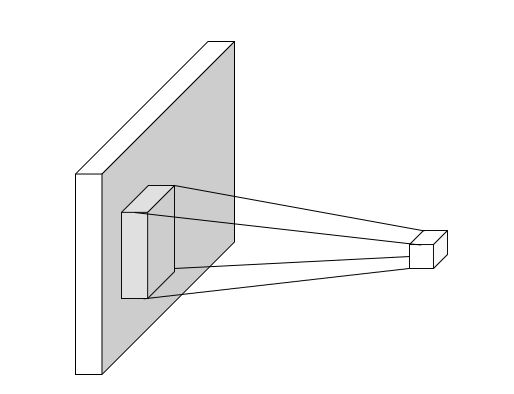
Convolutional layer
Limit the receptive fields of units, tiles them over the input image, and share the weights.
Equivalent to sliding the learned filter over the image , computing dot products at each location.
Padding: Add a border of zeros around the image. (higher padding, larger output size)
Stride: The step size of the filter. (higher stride, smaller output size)