1.3 KiB
1.3 KiB
CSE5519 Topic E.1 2021 and before: Deep Learning for Geometric Computer Vision
Note
This topic is presented by Me. and will be the most detailed one for this course, perhaps.
This topic is mainly about Depth Estimation from Monocular Images. (Boring, not even RANSAC)
PoseNet
A Convolutional Network for Real-Time 6-DOF Camera Relocalization (ICCV 2015)
Convolutional neural network (convnet) we train to estimate camera pose directly
from a monocular image, I. Our network outputs a pose
vector p, given by a 3D camera position x and orientation
represented by quaternion q:
p = [x, q]
q is a quaternion, x is a 3D camera position.
Unsupervised Learning of Depth and Ego-Motion From Video
(CVPR 2017)
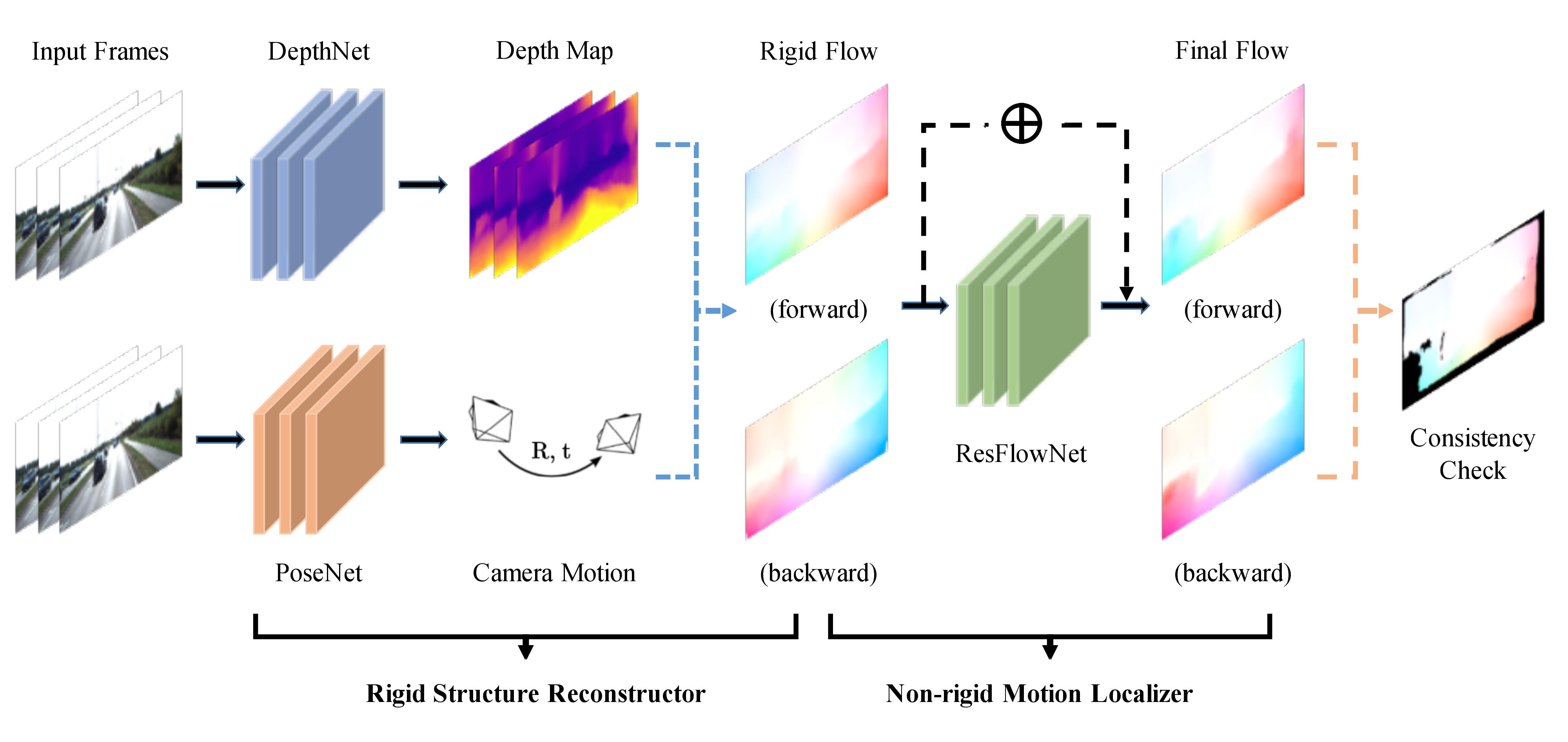
GeoNet
Unsupervised Learning of Dense Depth, Optical Flow and Camera Pose (CVPR 2018)